Edouard Leurent
About Me
Hi! I am a Senior Research Scientist at Google DeepMind, working on Gemini and generative models.
Research Interests
- Generative models: language models, diffusion models.
- Reinforcement learning: for systems optimisation, from human feedback.
Work and publications
-
 Google I/O
Google I/O
-
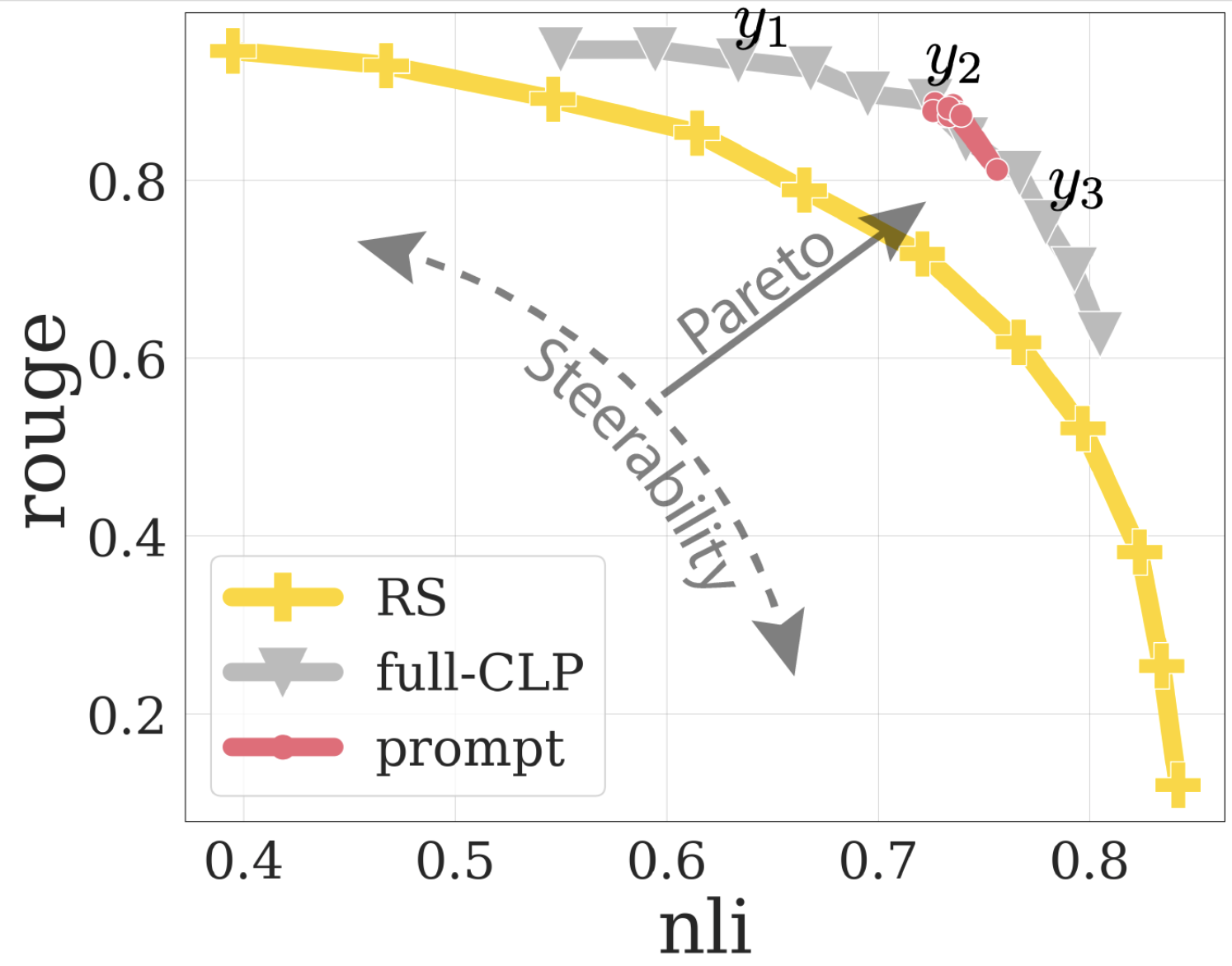 EMNLP
Findings of the 2024 Conference on Empirical Methods in Natural Language Processing
EMNLP
Findings of the 2024 Conference on Empirical Methods in Natural Language Processing -
-
 RoboSoft
2022 IEEE 5th International Conference on Soft Robotics (RoboSoft), 2022
RoboSoft
2022 IEEE 5th International Conference on Soft Robotics (RoboSoft), 2022 -
 ALT
International Conference on Algorithmic Learning Theory (ALT), 2021
ALT
International Conference on Algorithmic Learning Theory (ALT), 2021 -
 PhD Thesis
PhD Thesis -
 NeurIPS
Advances in Neural Information Processing Systems (NeurIPS), 2020, Vol. 33
NeurIPS
Advances in Neural Information Processing Systems (NeurIPS), 2020, Vol. 33 -
 NeurIPS
Advances in Neural Information Processing Systems (NeurIPS), 2020, Vol. 33
NeurIPS
Advances in Neural Information Processing Systems (NeurIPS), 2020, Vol. 33 -
 ALT
International Conference on Algorithmic Learning Theory (ALT), 2020
ALT
International Conference on Algorithmic Learning Theory (ALT), 2020 -
 ACML
Asian Conference on Machine Learning (ACML), 2020
ACML
Asian Conference on Machine Learning (ACML), 2020 -
 CDC
Proceedings of the 59th Conference on Decision and Control (CDC 2020)
CDC
Proceedings of the 59th Conference on Decision and Control (CDC 2020) -
 NeurIPS
Advances in Neural Information Processing Systems (NeurIPS), 2019, Vol. 32
NeurIPS
Advances in Neural Information Processing Systems (NeurIPS), 2019, Vol. 32 -
 ML4AD @NeurIPS 2019
Machine Learning for Autonomous Driving Workshop at NeurIPS 2019
ML4AD @NeurIPS 2019
Machine Learning for Autonomous Driving Workshop at NeurIPS 2019 -
 CDC
Conference on Decision and Control (CDC), 2019
CDC
Conference on Decision and Control (CDC), 2019 -
 ECML-PKDD
European Conference on Machine Learning and Principles and Practice of Knowledge Discovery in Databases (ECML-PKDD), 2019
ECML-PKDD
European Conference on Machine Learning and Principles and Practice of Knowledge Discovery in Databases (ECML-PKDD), 2019 -
 MLITS @NeurIPS 2018
Machine Learning for Intelligent Transportation System workshop at NeurIPS 2018
MLITS @NeurIPS 2018
Machine Learning for Intelligent Transportation System workshop at NeurIPS 2018

 Nature
Nature

Projects
-
-
-
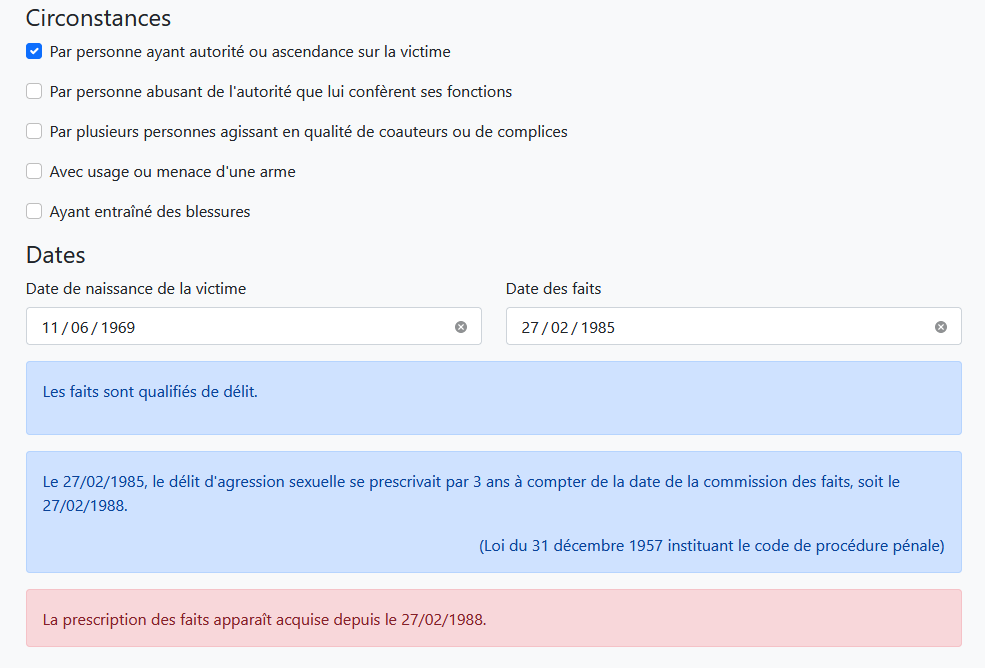 Tool to determine the statute of limitations for sexual offences in French criminal law
Tool to determine the statute of limitations for sexual offences in French criminal law -
-

-
-

-
-

-
-

-
-
Accomplishments
Abertis Prize for Best Doctoral Thesis, awarded by Abertis Chair . Certificate.Best PhD Award, awarded by CNRS (GdR MACS) & Club EEA . Certificate.Second prize at the "AI and the 3rd industrial revolution" Challenge . Certificate.
{kind=link}
{kind=link}